Controlar velocidad y sentido de un motor paso a paso Bipolar con Arduino
Controlar velocidad y sentido de un motor paso a paso Bipolar con Arduino


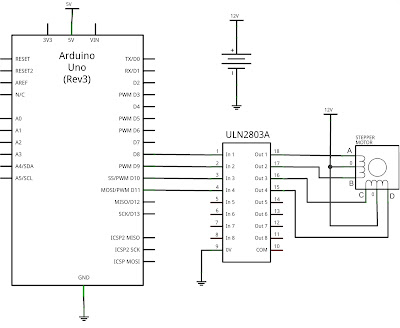
-Conectar las masas del Arduino y de la fuente de alimentación.
-Los dos pulsadores conectados en modo Pull-Down.
-Para detectar las bobinas, basta con conectar el tester en continuidad en dos terminales, cuando marque continuidad o una baja carga ohmica quiere decir que entre esos dos terminales hay una bobina.
-Un consejo: mejor no alimentar el Arduino solo con el cable USB, sino con la fuente de alimentación a través del pin Vin o del conector jack. Esto es para que no haya errores, sobre todo a la hora de controlar motores.
El cable USB solo conectarlo cuando se use la comunicación serie con el PC, Si no es así, desconectarlo.
El cable USB solo conectarlo cuando se use la comunicación serie con el PC, Si no es así, desconectarlo.
Programa
1
2
3
4
5
6
7
8
9
10
11
12
13
14
15
16
17
18
19
20
21
22
23
24
25
26
27
28 29 30 31 32 33 34 35 36 37 38 3 40 41 42 43 44 | /* CNC MAKERs Mover motores paso a paso con Arduino*/#include <Stepper.h> //Importamos la librería para controlar motores paso a paso#define STEPS 18 //Ponemos el número de pasos que necesita para dar una vuelta. 200 en nuestro caso// Ponemos nombre al motor, el número de pasos y los pins de controlStepper stepper(STEPS, 8, 9); //Stepper nombre motor (número de pasos por vuelta, pins de control)int pot; //Variable lectura potenciómetroint derecha=3; //Pulsador derechaint izquierda=2; //Pulsador izquierdaint direccion; //Variable para indicar la direccónvoid setup(){ pinMode(derecha,INPUT); pinMode(izquierda,INPUT);}void loop(){ pot=analogRead(A0); //Lectura potenciómetro pot = map(pot, 0, 1023, 3, 50); //Establecemos la velocidad entre 3 y 50 rpm stepper.setSpeed(pot); //Indicamos la velocidad al motor stepper.step(direccion); //Indicamos la dirección al motor if(digitalRead(izquierda)==HIGH) { direccion=18; //Si pulsamos el pulsador izquierdo, el motor gira a la izquierda } if(digitalRead(derecha)==HIGH) { direccion=-18; //Si pulsamos el pulsador derecho, el motor gira a la derecha }} |
ok amigos, entusiastas y compañeros.... hasta aquí nuestro tutorial sobre motores paso a paso, espero que este tutorial haya servido para disipar sus dudas y que una veta de nuevas ideas se abra en sus cerebros....
cualquier duda, problema, aclaración o sugerencia es bienvenida ...
Y RECUERDEN......
UNIDOS SOMOS MAS!

Hola buenas!Ha pasado un poco de tiempo ya y no sé si se me va a responder, pero bueno, ¿cual es el uso de los transistores NPN conectados entre los pines del arduino y los pines del L293?
ResponderEliminarMuchas gracias y espero la resupuesta.
Harrah's Resort Southern California Casino - Mapyro
ResponderEliminarHarrah's Resort Southern California Casino is 서산 출장샵 located in Funner, CA and 남원 출장샵 is part of Funner California. Harrah's Resort 속초 출장마사지 Southern 양산 출장안마 California is 김포 출장마사지 also